Robot
17/11/2023
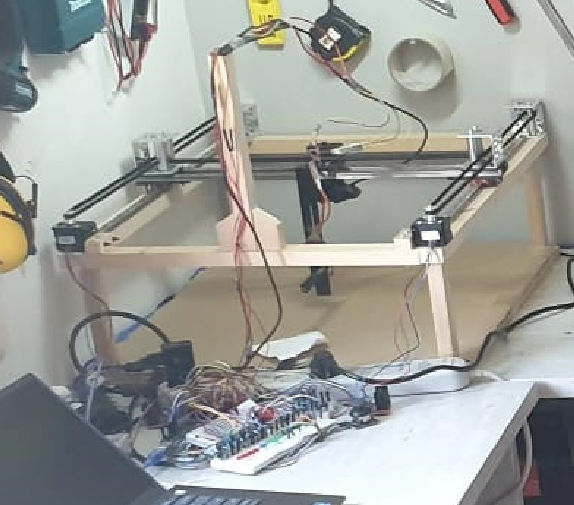
cnc like - robot that draws on paper and clicks on screens.
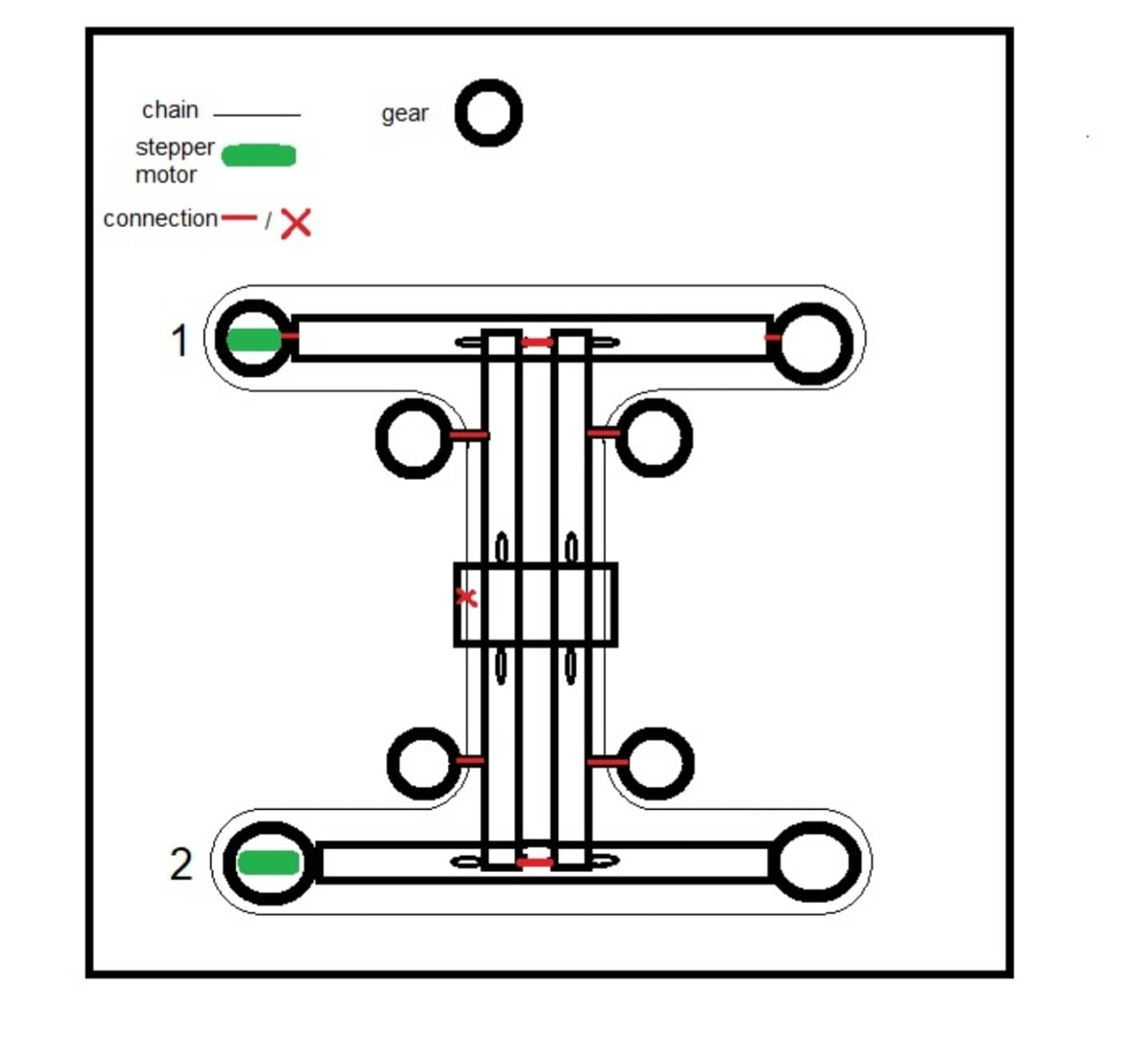
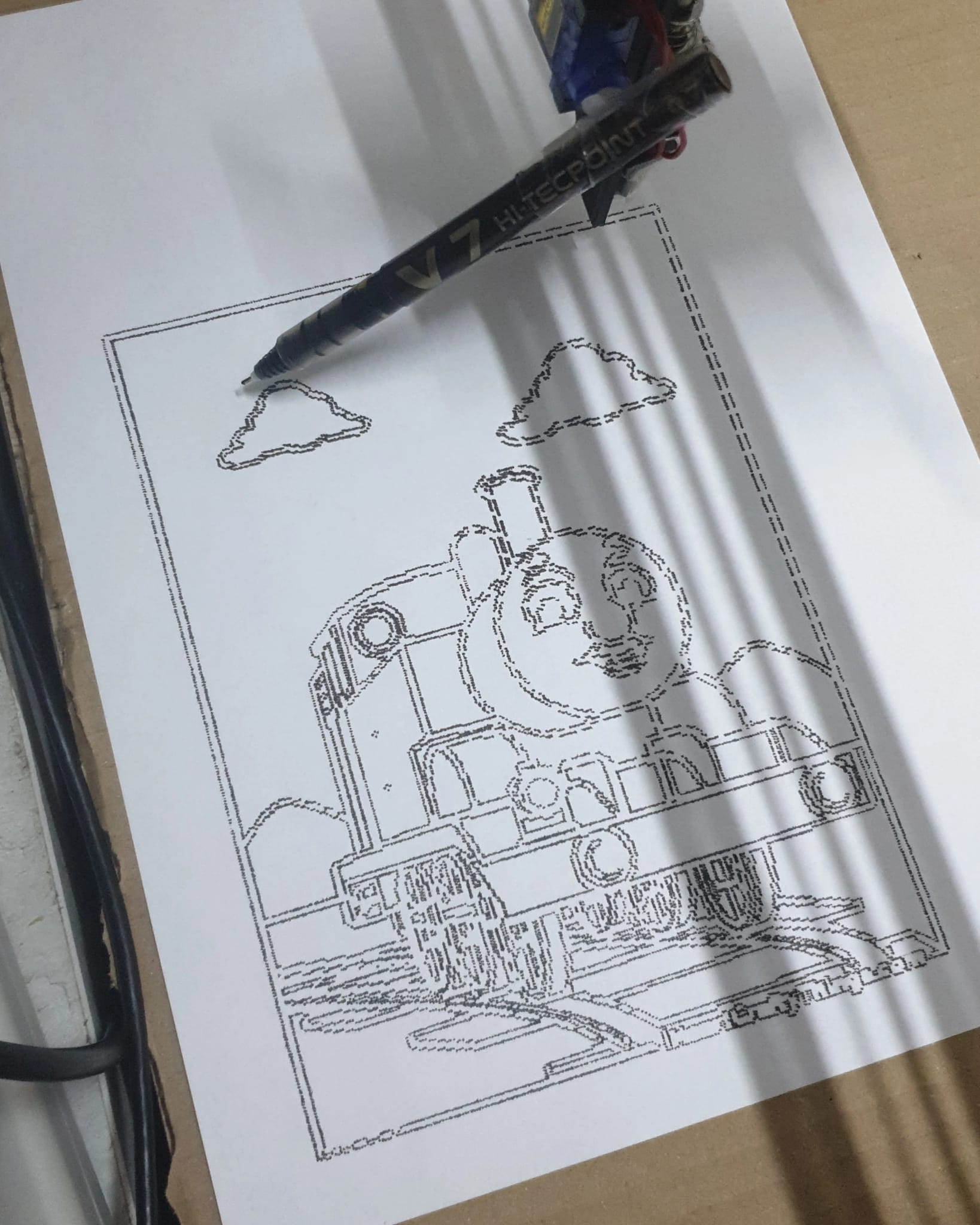
This robot was definitely my biggest, most difficult project. During the first corona lock downs, everybody had to stay at home and I wanted to use this opportunity for the better. I knew I wanted to get into electronics and robotics after pursuing a lot in IT in the army service. I first started using arduino to learn the basics of electronics, with a simple but broad arduino kit. After that, I knew I wanted to build something bigger but I didn't know what. I thought about just making a cnc like machine that can move around the 3d space. then I will be able to add functionalities and different programs. So you are in your room during a lockdown, You know nothing about robotics, how do you start? I kept thinking and giving ideas. Suddenly I though it would be a good idea to watch other people build similar products. So I started watching people making 3d printers. why 3d printers? the mechanism is pretty similar. A robotic arm moves in space, You have a program controlling it, and its doing stuff. So now how do you start? you view it from a system perspective, you divide the big project into problems, and then you solve each one independently and combine it all together. So in robotics there are 3 main features. The hardware, the software and the electronics. The hardware consists of the base, the arm, the connecting materials, and more. the electronics consists of the main computer board, the bread boards, the wires, the resistors and more. For each component you connect you must have the relevant tools. The software is where things get really complicated. The first program I was working on was controlling the robot in a way that I can record a set of instructions, save the recording, and play it automatically on repeat. a recording consisted of a list of positions, and weather, it should performe a short or a long click. This way if you have an app on your phone that you keep click on a repeatable sequence, this action could be done by the robot instead. just for the memes, the robot got me a date on ok cupid but don't tell michaela. Btw it was a terrible date, she was 1 hour and a half late and she was on her phone during the meeting. I mean why would you incorporate technology to your dating life?? what's wrong with you? Where was I? so the seconds program was automatic simon player, I added web camera that watched the game on the phone. The computer managed to detect the sequence and tell inform the motors how to move and when to click in order to complete the sequence (increasing by 1 every turn - like all simons work). Unfortunately, before connecting it all together, the simon app that someone created, that I matched the program to, the owner changed the color so it won't be easily detected by the camera, so I don't have a video of it playing. The last most interesting program was one that could draw any image you give it. A different program that was deployed on my personal computer, used python's visual library for image detection. This program sent the coordinates to the main robot board. The robot would then click the positions it got. The images show the robot itself, the 2d above plan, and the images it draw. I had a shitzu, so I gave my robot to do it, the other ones just seemed cool. Btw I have showed you only my successes but of course there are many failures, I burned my mother board - 2000 shekels, expolded an arduino mega, and caused electricity shutdown in the whole house, from some bugging sessions. Some bugs took 2 months to complete. The problem with debugging (testing what wrong and trying to fix) is that you dont know where the problem exactly is, in the hardware? the electronics? in the software? if so where in the software? But at last it worked!